
子供向けに視覚と触覚に訴求する
micro:bitで遊び始めたのはいいけれど。ノーマル状態でできることは案外限られていて…小さな子供の場合、最初は面白がっていじっていても、すぐに飽きてしまう。目標があってプログラムをしているなら頑張れる壁でも、子供の興味で続けさせるためには、五感に訴求する何かがないとダメ。
とりあえず訴求するには…何かが動き、操作している感じが重要。そう思って、いろいろ見ていて発見。
ELECFREAKS ring:bit car v2 for micro:bit
The ELECFREAKS Ring:bit Car is a small DIY smart car driven by the BBC micro:bit and the ELECFREAKS Ring:bit. The Ring:bit extends the micro:bit’s 3 GPIO ports and allow for different sensors and components to be easily attached to the micro:bit
プログラムしたとおりに走る。作った通りに動く点からして、子供の興味を引きそう。しかも、$22.90とお手頃価格。ただ、FreeShippingの条件や為替レートを考えると、
こっちの方が有利っぽい。しかもPrimeでお急ぎ便使っても3,457円(税込 2019/12時点)。送料や不良品時の交換などを考えると、差額はほぼ保険代と言ってもいいレベルというか、気にならないレベルだし。
Amazonのサイトの表示はV1.0になっているけれど…実際に届くのはV2.0です。
とりあえず、子供のクリスマスプレゼントを兼ねてポチっと、あっさりと発注。
Ring:bit Car V2.0
実際に届いたもの。

紙のスリーブをまとったプラスティックケースで到着。

ケースを開けるとこんな感じにパーツが袋詰めされて出てきます。丁寧にもドライバーまで付属しています。
ただ、残念なのがこのドライバー。実際に付属しているねじを締めるには細すぎるドライバーです。大人が頑張って使えばこれで十分なんですが、子供とかが締めるとなると力を入れないと締めにくく、手が滑ったりするとケガの元です。できればドライバーは別の適切なものを用意した方がよさそうです。


袋から取り出してみると、アクリルのボードが4枚、タイヤが一組、サーボモータが2つ、基板が2枚。その他にこまごまとした部品が多数。
マニュアルと見比べて検品します。サーボモーター周りの部品が余分についてきていたりしますが、その点は無視していくことにします。
組み立てる
マニュアルの絵を見ながら組み立てていきます。

まず、側板になるアクリル板にサーボモータをはめ、ねじ止めしてしまいます。ネジは短めのタッピングネジをサーボモーターの両端に1か所ずつ(2か所)止めます。ケーブルが前方に出るように止めます。

サーボモーターをネジ止めしたのちに、車輪を嵌めます。
車輪、よく見ると軸部分が左右非対称で、片側にはうっすらと溝が彫られており、反対側はきれいな穴となっています。溝のある方がサーボモーターとかみ合う設計の様ですので、方向を間違わずに差し込みます。差し込んだのちにタッピングネジで固定します。


簡単そうに見えて、面倒だったのがこれ。ボールベアリングの固定。
ベアリングの台座にピンをあらかじめ刺した状態にして、台座のアクリル板に差し込みます。この順番で差し込むと簡単に固定できます。ピンの頭がちょっと大きすぎてボール台座に干渉する状況という、微妙な設計ミスが原因ですね。

はめ込めたら組み立てです。側板の溝にアクリル板と基板を差し込みます。基板には中央部分にコネクタがついており、延長ケーブルがさせるようになっています。フラットケーブルのツメのついている側を刺しておきましょう。

両端をくみ上げたら、長いネジの組を両側板を固定する感じで固定します。ネジの長さが微妙に足りないので、完全に締めこむとアクリル板がゆがみます。適度に締まった状態までになったら、締めこまずに終わりにします。

できたら、個人的な趣味ではありますが、左右のサーボモーターから出る線と基板から出ている線を軽くよじって一本線にしておきます。あとで整線が楽になります。

このキットには、肝心の micro:bit がついてません。別口で購入した micro:bitを用意します。

ring:bit 2 の基板。どう見ても猫に見える。狙っているんだろうけれど。

この2枚の基板をネジで締めこんでいきます。ネジはさらネジを使用します。接触不良にならない程度、締めすぎない程度に締めておきます。大人なら指二本でドライバーをつまんだ状態で締めこめるレベルのトルクで十分です。

最後に裏側に出ているピンと接続して完了です。
今回は、よじったケーブルを適当な間隔で糸で縛って整線してあります。
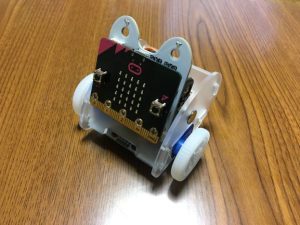
整線したケーブルを隙間に押し込みながら定位置にmicro:bitをはめ込んで完成。

組み立て完了後、残った部品たち。サーボモーターの付属品と予備のネジ、鉛筆を付けるためのバンド。後で何かに使えるだろうモノなので、保管箱行きです。
実際に動かしてみる
プログラムして走らせてみます。
プログラムするためには、MakeCode for microbit に Ring:bit Carのライブラリを追加してあげる必要があります。
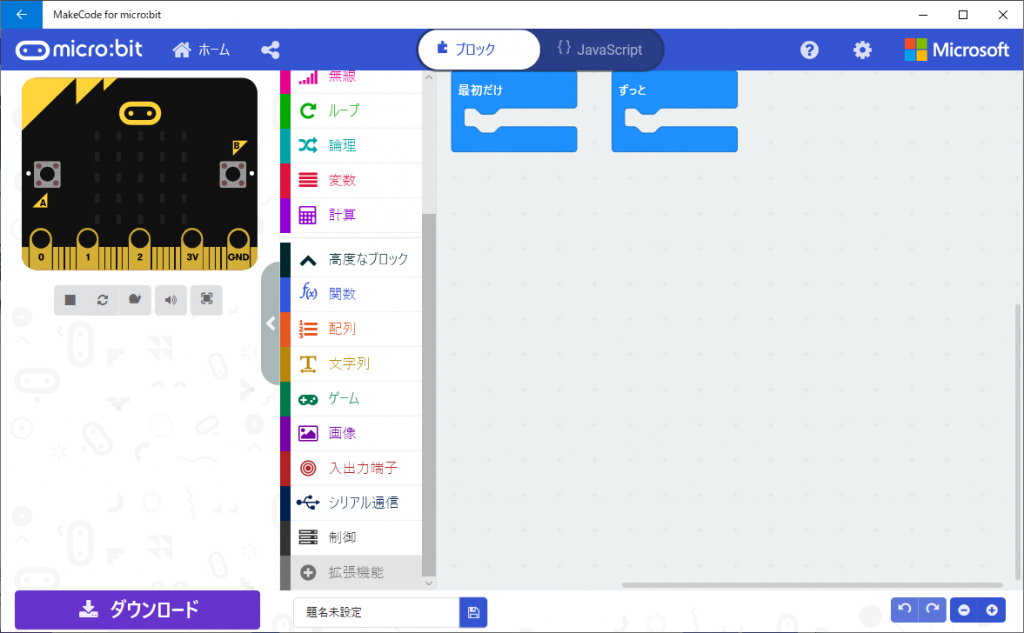
メニューから「拡張機能」をクリックします。
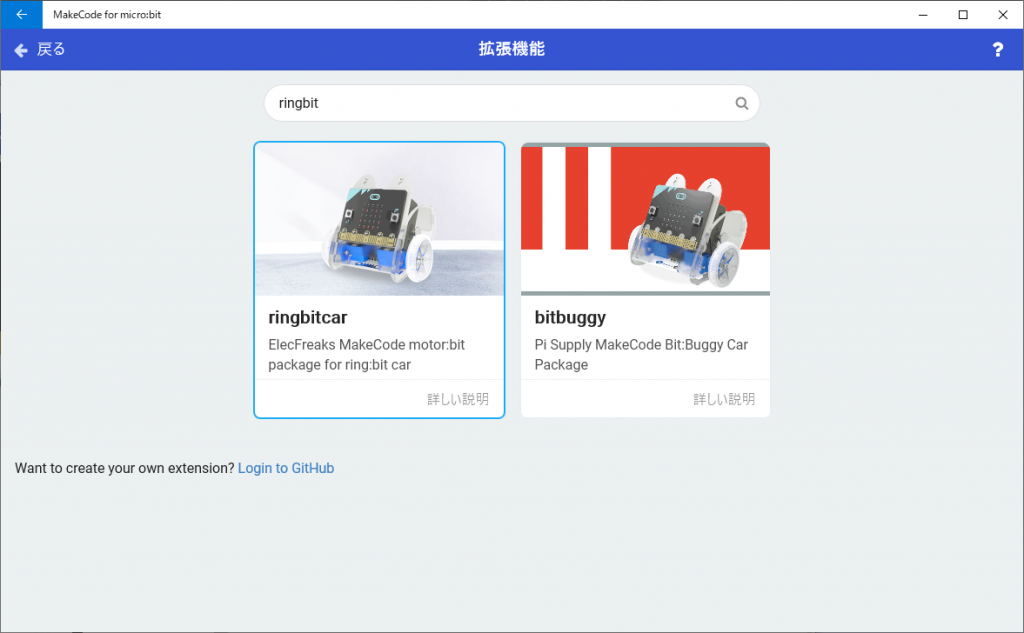
検索窓に「ringbitcar」と検索すると「ringbitcar」が出てきますので、クリックしてインストールします。
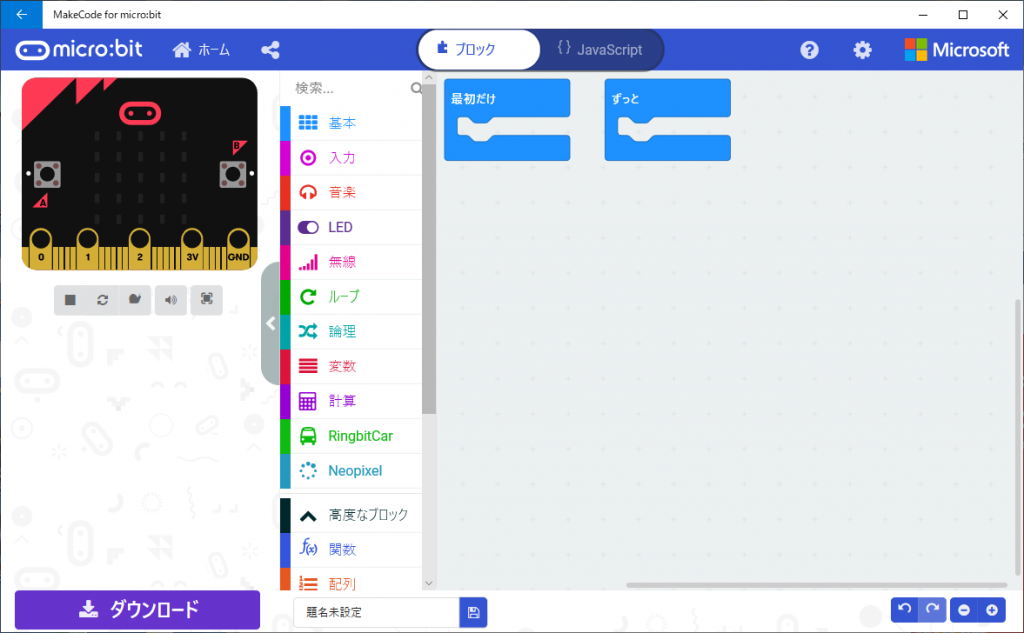
メニューに「RingbitCar」のメニューが出ていることを確認。その中にあるブロックを組み合わせます。

ポイントといえば、
- 「最初だけ」に「左の車輪を設置する[P1]右の車輪を設置する[P2]」を設置する。
- 「急な前進」等の命令の後には、「一時停止(ミリ秒)」を加える。一時停止した時間分、Ring:bit Carが動く。
- 最後に「停車」を入れないと走り続けてしまう。
と、こんな感じ。ちなみにサーボモーターなのに、左右同じ時間だけ回したつもりでも舵角が全く異なります。躍らせるような制御ならいいけれど、90度曲げてみようとかしたい場合はかなり実機で動かしてみて確認する必要がありそうですね。
コメント